
Технический проект
На данный момент мы завершили проектирование робота в соответствии регламенту и начали его сборку. Робот состоит из 2х секций. В нижней располагается электроника и элементы питания, а также шаговые двигатели и драйверы к ним. Верхняя часть - кузов. Вместимость кузова - не менее 8 шаров диаметром 100 мм. Впереди в небольшом углублении расположен манипулятор. На представленном ниже рисунке изображена его предварительная конструкция, на ряду с ней проектируется дополнительная система вертикального подъема.
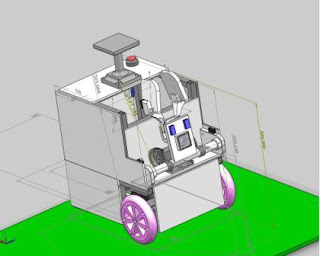



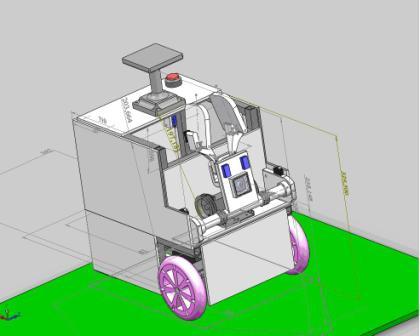
Впереди расположен манипулятор с микропереключателями, управляемый сервоприводами, под ним расположена видеокамера. Манипулятор будет изготовлен из фотополимера. Весь робот состоит из стандартных профилей и элементов ПВХ панелей снаружи. Вверху расположена подставка под инфракрасный маяк


Кузов открывается сервоприводами для сброса объектов. Площадка кузова наклонная.

Внизу впереди установлены источники питания – 2 необслуживаемых свинцовых аккумулятора, шасси, драйвера шаговых двигателей и колеса от самоката. Вся конструкция выполнена из алюминия АД-31 - профиль и полоса. Манипулятор поднимается с помощью цифровых сервоприводов по типу «морских лебедок». Время работы агрегата – 45 минут. Сила схватывания - до 300 грамм . Емкость кузова – до 10 объектов ( максимум, номинал - 8).
Сборка робота будет закончена в течении 4-5 дней и истинный вид его будет доступен на нашей странице. Ждем отзывов и предложений!