03:40
Автор:
LORD.TIRAN
Действующие лица:
Жуков Роман - корректировка и разводка схем, пайка.
Иконников Евгений - пайка, разводка схем.
Картавый Павел - пайка,проектирование и разводка схем.
Пройдаков Евгений - проектирование и корректирование схем.
Команда уверенно приступила к созданию электронной начинки нашего робота. Были спроектированы и разведены в черновом варианте схемы для управления сервоприводами и шаговыми двигателями с COM-порта.
Принципиальная схема соединения ATmega162 с COM-портом.
Все схемы проектировались в Altium-2009. Эта гибкая среда разработки позволят быстро и удобно проектировать схемы разного уровня сложности. Схема содержит соединение контроллера с COM-портом, так же был предусмотрен разъем для отладки через JTAG.
Пример платы в Altium.
После вычерченные платы, были отпечатаны на фотобумаге LOMOND и переведены на текстолит методом "Лазерного утюга".
Пример черновой печати на обычной бумаге.
Специальная фотобумага "LOMOND".
Далее производилась разводка и впаивание компонентов в платы.
Примеры плат.
По ходу процесса производства плат был выявлен ряд недостатков по расположению компонентов и способу разводки. Все недочеты будут исправлены в следующих версиях плат.
Команда VIRUS поздравляет всех с наступающим Новым Годом. Желает всего самого наилучшего!!! С праздником!!!
16:00
Автор:
LORD.TIRAN
Итак, сейчас уже уверенно можно сказать, что сборка робота завершена на 90%. Мы планируем спроектировать дополнительный манипулятор, но на данный момент установлен схват. Окончательное решение по поводу манипулятора примем после испытаний.
Сборка робота осуществлялась 3 недели, на этом этапе работы участвовали Жуков Роман - сборка и частично изготовление деталей, а также Иконников Евгений - изготовление деталей по чертежам.
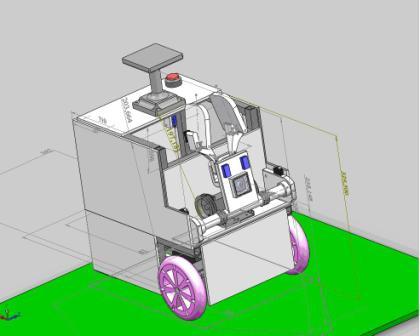
Процесс изготовления происходил по размерам, взятым непосредственно с 3D модели робота, которая проектировалась соразмерно и представляет собой сборку масштабом 1:1.
Робот получился довольно тяжелым, вес порядка 8 кг.
Измерение робота после изготовления показало, что габариты регламента соблюдены, при этом запас по периметру в нерабочем состоянии составляет 6 см.
Запас по высоте - 3 см.
Как видно, впереди расположена камера, крепления вала манипулятора были изменены по сравнению с моделью. Кроме того, были изменены несколько других частей манипулятора из-за большого расхода материала при изготовлении на 3d принтере.
13:22
Автор:
LORD.TIRAN
На данный момент мы завершили проектирование робота в соответствии регламенту и начали его сборку. Робот состоит из 2х секций. В нижней располагается электроника и элементы питания, а также шаговые двигатели и драйверы к ним. Верхняя часть - кузов. Вместимость кузова - не менее 8 шаров диаметром 100 мм. Впереди в небольшом углублении расположен манипулятор. На представленном ниже рисунке изображена его предварительная конструкция, на ряду с ней проектируется дополнительная система вертикального подъема.
Впереди расположен манипулятор с микропереключателями, управляемый сервоприводами, под ним расположена видеокамера. Манипулятор будет изготовлен из фотополимера. Весь робот состоит из стандартных профилей и элементов ПВХ панелей снаружи. Вверху расположена подставка под инфракрасный маяк

Кузов открывается сервоприводами для сброса объектов. Площадка кузова наклонная.
Внизу впереди установлены источники питания – 2 необслуживаемых свинцовых аккумулятора, шасси, драйвера шаговых двигателей и колеса от самоката. Вся конструкция выполнена из алюминия АД-31 - профиль и полоса. Манипулятор поднимается с помощью цифровых сервоприводов по типу «морских лебедок». Время работы агрегата – 45 минут. Сила схватывания - до 300 грамм. Емкость кузова – до 10 объектов ( максимум, номинал - 8).
Сборка робота будет закончена в течении 4-5 дней и истинный вид его будет доступен на нашей странице. Ждем отзывов и предложений!
14:27
Автор:
LORD.TIRAN
Привет всем от Жукова Романа. Я являюсь руководителем команды, отвечаю за организационные мероприятия, снабжение комплектующими для робота, полный цикл проектирования – от технического предложения до технического проекта, а также участвую в подготовке деталей, компоновке и сборке робота. Я, как и остальные участники, являюсь студентом 3 курса кафедры РК-10 МГТУ им. Н.Э. Баумана. В сфере моих интересов находятся: проектирование изделий, микроконтроллеры, программирование, ТРИЗ. В свободное время люблю просматривать документальные фильмы, играть в баскетбол. В команде выполняю роль конструктора.
Здравствуйте. Я Пройдаков Евгений, студент МГТУ им. Н.Э.Баумана третьего курса кафедры РК9-51. Увлекаюсь высокими технологиями, автоматизацией, робототехникой, философией и плаванием. В свободное время люблю гулять по Москве, ходить в кино, проводить время с друзьями.
В команде отвечаю за разработку, установку и отладку систем:
1. Интерфейсов обмена данными между всеми компонентами робота.
2. Обнаружения чужого робота, для избегания столкновений с последним.
3. Взаимодействием робота с маяками для координации его деятельности.
От соревнований хочу получить опыт международного общения и навыки работы в команде.

Меня зовут Суворов Дмитрий Андреевич. Я учусь на третьем курсе МГТУ имени Баумана на кафедре «Роботы и Робототехнические Системы». Интересуюсь программированием, в команде отвечаю за техническое зрение и стратегический уровень управления. В свободное время хожу на айкидо.
Я, Иконников Евгений, как и другие участники команды являюсь студентом 3 курса МГТУ им. Н.Э. Баумана. В команде я отвечаю за сборку робота, слежу за его техническим состоянием, участвую в его проектировании. Помимо технических дисциплин увлекаюсь спортом, в частности, плаванием, которым занимаюсь с 7 лет, и футболом.
Добрый день!
Я, Картавый Павел, студент МГТУ им. Н.Э. Баумана группы РК10-51. Мои увлечения - робототехника, проектирование, а также кудо и водное поло.
В проекте Eurobot2010 я отвечаю за реализацию аппаратного уровня, в том числе:
- разработка алгоритмов управления шаговыми приводами и серводвигателями.
- разработка интерфейса обмена между материнской платой и контроллерами.
- сборка и отладка электроники
15:17
Автор:
LORD.TIRAN
Немного о команде…
Наша команда состоит из 5 человек.
Жуков Роман – РК10-51
Суворов Дмитрий – РК10-51
Картавый Павел – РК10-51
Пройдаков Евгений – РК9-51
Иконников Евгений – РК10-51
Все члены команды – студенты 3 курса факультета РК.
В этом году мы планируем сделать мобильного робота, использующего простейшую систему технического зрения. Робот будет состоять из 2 шаговых двигателей, 6 сервомашинок, двухколесного шасси с шарниром, веб-камеры, 3 микроконтроллеров, системы питания от двух аккумуляторов 12 вольт, блока питания ATX 12v, манипулятора, материнской платы mini-ATX и других частей. Мы приняли решение отказаться от привязки робота к системе координат, сделав робота адаптивным. На сайте вы можете проследить за ходом работы, ознакомиться с регламентом. По мере выполнения проекта мы будем описывать поэтапно нашу работу. Будем рады вашим советам, замечаниям, предложениям. По этим вопросам вы можете написать капитану команды Жукову Роману по адресу:
Delphi_night@rambler.ru